Кубообразный робот Cubli балансирует на одном углу и может двигаться самостоятельно
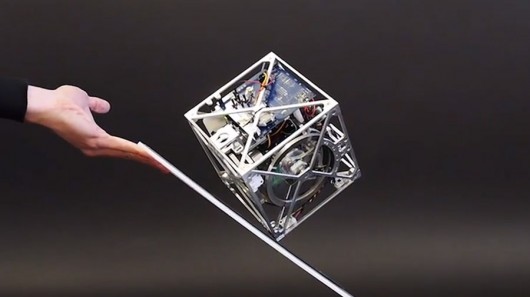

Робот, размером 15 см. с каждой стороны, содержит три «маховика», каждый из которых работает на собственном бесщеточном электродвигателе и расположен на разных гранях куба. Он также включает инерциальные датчики, контроллеры двигателей, аккумуляторы и микропроцессор.
Инерциальные датчики позволяют процессору измерять угол наклона и угловую скорость куба. Во время достижения угловой балансировки активизируются колеса, которые в сочетании с постоянно-модулированным крутящим моментом удерживают куб на месте. Cubli даже может поддерживать балансировку, если его толкнуть или наклонить поверхность, на которой он находится, плюс ко всему, способен вращаться на месте или балансировать на одном краю.
Маховики внутри куба, находящегося в спокойном режиме, работают на высокой скорости. При резком торможении, куб становится в вертикальное положение, после чего маховики движутся в обратную сторону для стабилизации новой позиции. Таким образом, повторяя эти действия, робот может передвигаться из одной стороны в другую.
В конечном итоге, есть надежда, что такая технология сможет реализовать себя, например, в роботах, используемых для изучения поверхности других планет.
Демонстрацию роботизированного куба Cubli, разработанного Мохэнараджей Гэджэмохэн (Mohanarajah Gajamohan) и Рафаэль ДеАндреа (Raffaello D'Andrea), можно увидеть ниже.
Комментарии:

Обзор технологий стелс в военной авиации
Военная авиация играет решающую роль в современных конфликтах, и ее эффективность зависит от различных факторов, включая возможность избежать обнаружения и атаки противника.

Цветы: как они влияют на нашу жизнь и эмоции
Цветы играют особую роль в жизни каждого человека.
Техника Lenovo: надежность и долговечность при эксплуатации
Покупка технического устройства - это процесс, в котором важно учитывать различные нюансы, напрямую связанные с базовыми характеристиками приспособления и его функциональностью.

Лучшие модели наушников JBL: обзор и характеристики
JBL наушники широко известны высоким качеством звука и надёжностью, благодаря чему они завоевали доверие различных категорий пользователей — от меломанов до спортсменов.
Техника Lenovo: надежность и долговечность при эксплуатации
Покупка технического устройства - это процесс, в котором важно учитывать различные нюансы, напрямую связанные с базовыми характеристиками приспособления и его функциональностью.
Лучшие модели наушников JBL: обзор и характеристики
JBL наушники широко известны высоким качеством звука и надёжностью, благодаря чему они завоевали доверие различных категорий пользователей — от меломанов до спортсменов.

e-Learning в цифрах: 6 общих фактов, много данных и прогнозы на ближайшее будущее
e-Learning – это обучение с помощью цифровых технологий (Интернета, электронных устройств и специальных программ). Процесс можно организовать в аудиториях или удалённо, одновременно для целой группы или по гибкому графику для каждого.
Компьютерный чип со встроенной тканью человеческого мозга получает финансирование от военных
В прошлом году ученые из Университета Монаша создали «DishBrain» — полубиологический компьютерный чип, в электродах которого в лаборатории выращено около 800 000 клеток мозга человека и мыши. Демонстрируя что-то вроде разума, он научился играть в пинг-понг за 5 минут.
