Робототехники ищут вдохновения у природы

Проект направлен на исследование биологических систем, включающих движения конечностей, а также разработку их механического аналога для универсального применения в разработке роботов.
В настоящее время их работы основаны на двустороннем подходе, ориентированном на командную работу среди муравьев и скользящие движения змей. Сфера деятельности распространяется на разведку и наблюдение их деятельности. Идея состоит в нахождении оптимального способа движения с использованием наименьшего количества энергии. Во главе с профессором Дэвидом Ху, команда исследователей сосредоточила внимание больше на энергетическом аспекте, а не на внешности.
.jpg)
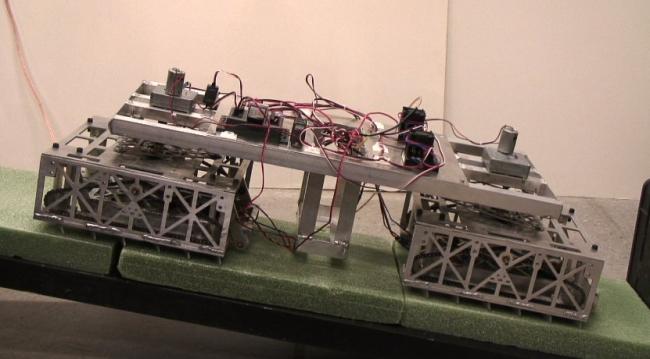
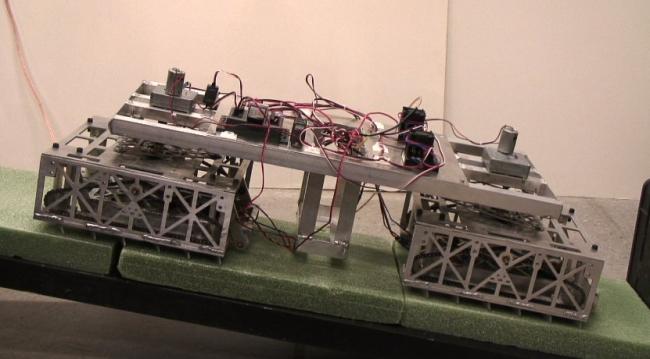
Форма тела и движения змеи высоко оптимизированны для перемещения по всем видам местности и поверхностей. Она может двигаться практически по всем склонам и наклонам. Она также может втиснуться в ограниченные и труднодоступные места. Исходя из этих характеристик, роботы-змеи уже существуют, но они потребляют огромное количество энергии и быстро перегреваются. Scalybot 2.0, в основе которого лежит исследование более чем 20 разновидностей змей, представляет собой вездеходную змею. Может он и не выглядит как настоящая змея, но он определенно имитирует ее движения. Используя прямолинейное движение змей, он буквально протаскивает себя вперед.
Изучение групповой динамики роя огненных муравьев привело к другой великой идее. Ни один из огненных муравьев не может плавать по отдельности, но они образуют большие стаи и формируют из себя большой шар, который легко плывет по поверхности воды. Это вдохновило на разработку крошечных роботов, которые могут перемещаться по местности, собираясь из автономных единиц в более крупные образования. Эта синергия может быть использована для преодоления препятствий, преодолеть которые одному невозможно.
Суть исследования заключается в эффективности использования энергии. В случае успеха этого проекта, мы сможем получить принципиально новых экологически чистых роботов. Например, мы могли бы создавать роботов, питающихся от солнечных батарей, которые будут производить мониторинг окружающей среды и принимать необходимые меры по восстановлению, или даже заменять человека в потенциально опасных видах деятельности, таких как техническое обслуживание ветровых турбин.
Изучение природы и ее принципов и методов, безусловно, будет следующим большим шагом в области робототехники. Мы должны видеть, насколько хорошо мы можем подражать природе в этом начинании.
Комментарии:

Обзор технологий стелс в военной авиации
Военная авиация играет решающую роль в современных конфликтах, и ее эффективность зависит от различных факторов, включая возможность избежать обнаружения и атаки противника.

Цветы: как они влияют на нашу жизнь и эмоции
Цветы играют особую роль в жизни каждого человека.
Техника Lenovo: надежность и долговечность при эксплуатации
Покупка технического устройства - это процесс, в котором важно учитывать различные нюансы, напрямую связанные с базовыми характеристиками приспособления и его функциональностью.

Лучшие модели наушников JBL: обзор и характеристики
JBL наушники широко известны высоким качеством звука и надёжностью, благодаря чему они завоевали доверие различных категорий пользователей — от меломанов до спортсменов.
Техника Lenovo: надежность и долговечность при эксплуатации
Покупка технического устройства - это процесс, в котором важно учитывать различные нюансы, напрямую связанные с базовыми характеристиками приспособления и его функциональностью.
Лучшие модели наушников JBL: обзор и характеристики
JBL наушники широко известны высоким качеством звука и надёжностью, благодаря чему они завоевали доверие различных категорий пользователей — от меломанов до спортсменов.

e-Learning в цифрах: 6 общих фактов, много данных и прогнозы на ближайшее будущее
e-Learning – это обучение с помощью цифровых технологий (Интернета, электронных устройств и специальных программ). Процесс можно организовать в аудиториях или удалённо, одновременно для целой группы или по гибкому графику для каждого.
Компьютерный чип со встроенной тканью человеческого мозга получает финансирование от военных
В прошлом году ученые из Университета Монаша создали «DishBrain» — полубиологический компьютерный чип, в электродах которого в лаборатории выращено около 800 000 клеток мозга человека и мыши. Демонстрируя что-то вроде разума, он научился играть в пинг-понг за 5 минут.
